Team Nirma AUV comprises highly enthusiastic and persevering students working on underwater robotics together. Team members range from freshman to senior undergraduates from various branches of engineering, with all having on hand experience building several AUVs and ROVs. Our Aim is to promote the field of underwater robotics and autonomous systems and excel in it. Team Nirma AUV was incepted in 2017 and since then, the team has participated in many national and international competitions like AMUROVc, NIOT competition of ROV, SAUVC, RoboSub, Teknofest, etc.
Underwater robots can be categorised as Remotely Operated Vehicles (ROVs) or Autonomous Underwater Vehicles (AUVs). Autonomous Underwater Vehicles (AUVs) are highly automated and operate independently, while Remotely Operated Vehicles (ROVs) are remotely operated by a human operator.
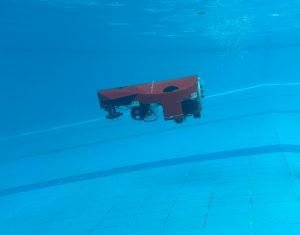
AUV is designed to work underwater and is controlled remotely by an operator. It is connected to the remote operator through a series of cables for transmission of data. It can be deployed underwater in place of human divers to carry out some specific tasks. It is equipped with a variety of sensors like cameras, lights sensors, SONAR, etc and may have one or many manipulators to grab things, cut the objects or lift the stuff. It can be used in shipwreck inspection, ship hull inspection, deep-sea study, ocean exploration, oil rigs, and oil spills to reach areas where humans’ reach is difficult.
For the development of the AUV which can complete the competition tasks, an interdisciplinary team of students is formed which is mainly structured into three divisions like Mechanical, Software, and Electrical. The mechanical division is responsible for hull design, waterproofing, gripper design, and fabrication of the structure. The software division is responsible for developing software such as GUI interface, ROS programming, establishing communication, gaining remote access to onboard computers, and underwater image enhancement. While the electrical division looks after power delivery to each component, PCB designing, and development of the kill switch. All the divisions have their assigned tasks but still they are integrated and united in one team with one goal.
Gallery
2nd prize - SAUVC 2025
SAUVC 2024 (in top 10)
Agastya 4.0 (SAUVC24)
Team Nirma AUV
AMU ROVc 2023
SAUVC 2022 (7th rank)
AMU ROVc 2024
Agastya 4.1 (AMU ROV 3.0)
First prize ₹10 lakh
(Underwater Robot)
Agastya 2.0 (AMU ROV 2.0)
Agastya 5.0 (SAUVC 25)
Achievements
2nd prize at International Autonomous Underwater Challange SAUVC 2025 held at Singapore during 14 - 17 March, 2025
1st prize worth ₹10 lakh won by Team Nirma AUV in National level AUV competition ROBOFEST 4.0 organized by GUJCOST, Gandhinagar at Science City Ahmedabad during 21 - 24 January 2025..
2nd prize worth ₹7.5 lakh won by Team Nirma AUV in National level AUV competition ROBOFEST 3.0 organized by GUJCOST, Gandhinagar at Science City Ahmedabad during 28 - 29 December 2023.
Three times National Champions - “AMUROVc’” , held at Aligarh Muslim University, Uttar Pradesh and team won cash prize of 25,000 INR in year 2023, 2024 and 2026.
Ranked in top 10 teams out of 83 team participated across the world in “SAUVC’24” held at Singapore Polytechnic, Singapore
Ranked 7th amongst 93 teams across the world in “SAUVC’22” held at Singapore Polytechnic, Singapore
2nd Runners Up - “AMUROVc’22”, held at Aligarh Muslim University, Uttar Pradesh
Shortlisted for final round of “Teknofest’23” Ankara, Turkey
Finalist of SAUVC’18 and SAUVC’19, held at Singapore Polytechnic, Singapore, Singapore Polytechnic, Singapore
Faculty Leadership
Dr R N Patel
Chairman, Technical Competititve Activities Director, Institute of Technology, Nirma University
Faculty Mentors
Dr Akash Mecwan
Assistant Professor, Electronics and Communictaion
Admissions to the University are strictly based on merit and in accordance with approved policies and procedures.
No individual within or outside the University, nor any agent or agency, is authorized to influence admission decisions in exchange for money, favors, or any other consideration. Applicants and parents are strongly advised not to entertain or respond to any such appeals.
If you receive any communication seeking payment or promising admission, please report it immediately to: